通用模块
1. 使用相对/绝对路径替换查找路径
从Simpack 2025开始,查找路径(Search Paths)现在标记为已弃用(deprecated),默认情况下不再可用。但是仍然可以通过Extra>Options窗口中的设置启用Search Paths功能。
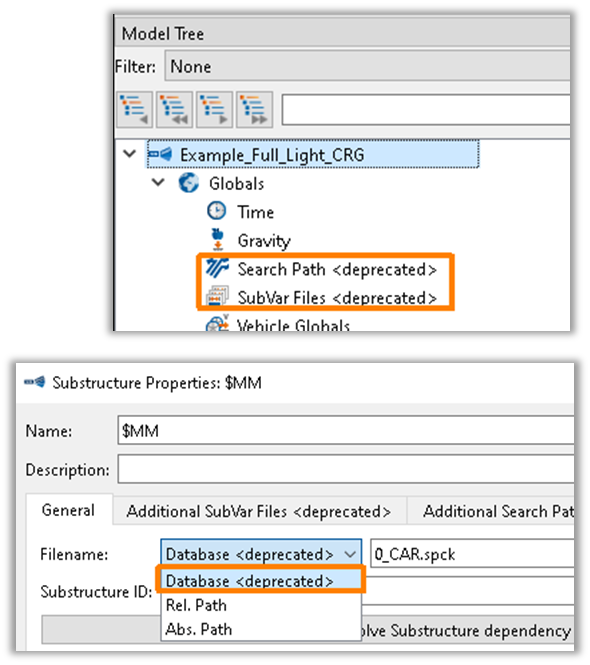
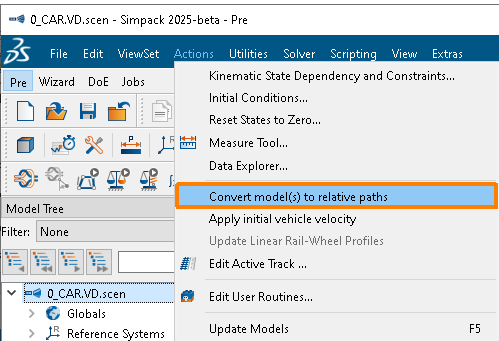
Simpack在菜单中提供 “Convert model(s) to relative paths”命令,可以直接把现有模型的查找路径设置转换为相对路径。
2. Node.js是唯一的脚本语言
Node.js现在是Simpack中唯一使用的Javascript引擎。使用Node.js作为脚本引擎,可以通过庞大的Javascript生态系统,极大地拓展脚本编写的可能性。例如:访问远程数据库和Web服务器,使用特定的库进行数学运算,读取或导出数据到特定的格式。
Node.js 现已全面应用于 Simpack 的前处理、后处理、求解器以及导航模块。开启了全新的工作流程,例如,求解器脚本现在可以调用后处理脚本功能(如读取 Simpack 二进制结果文件(.sbr)的内容)。

3. 支持step格式的装配体导入
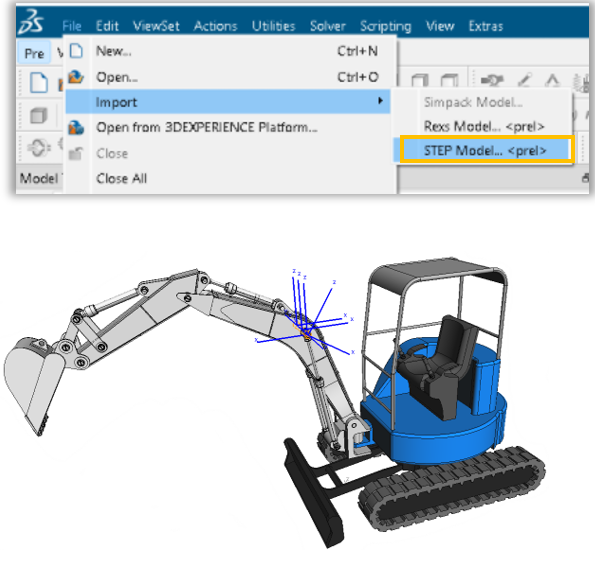
现在可以将 STEP AP242 装配文件中的模型导入到 Simpack 中了。通过 Simpack 前处理中的File->Import->STEP Model命令使用该功能。
在导入过程中,会根据 STEP 文件生成具有质量属性和可视化效果的多个刚体部件,同时还会为相应的坐标系生成标记点。此导入功能的未来版本可能还会从 STEP 文件中直接导入运动学连接。
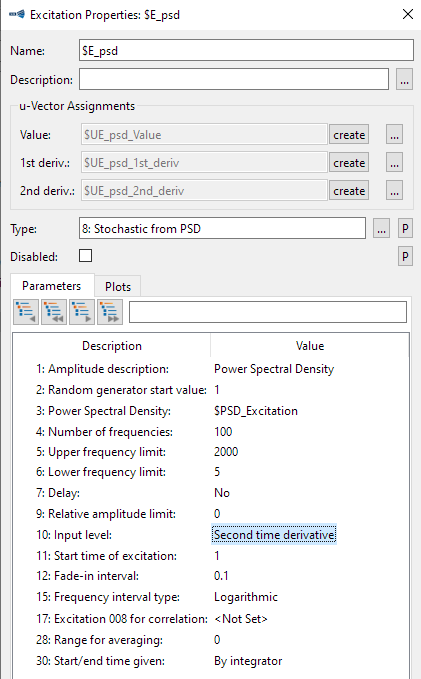
4. 基于速度和加速度层面定义功率谱密度(PSD)的新选项
激励 8 “’Stochastic from PSD” 用于根据频域中的功率谱密度在时域中定义一个伪随机信号。在之前的 Simpack 版本中,此输入仅能在位移层面进行定义。而在此版本中,现在可以在速度或加速度层面定义该激励了。
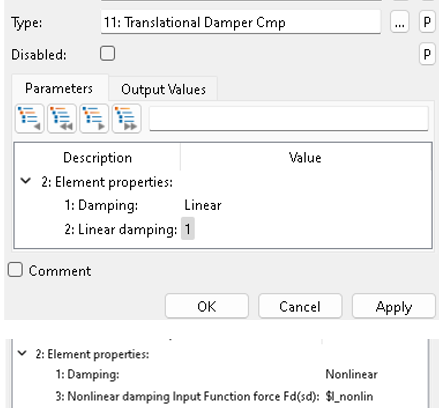
5. 新力元FE11 ‘Translational Damper’
为了对始终与两个标记点之间的速度矢量方向相反的阻尼进行建模,新增了力元 11 “平移阻尼器”。
阻尼力会同时作用于From Marker和To Marker,补偿扭矩r x F 则作用于From Marker,并且力的方向与两个标记点之间的相对速度方向相反。该阻尼与标记点的相对位置无关。阻尼系数可以是常量,也可以是与速度相关的变量。
与典型的point-to-point力元不同的是,当两个标记点位置重合时,该力元不会出现奇异性问题。
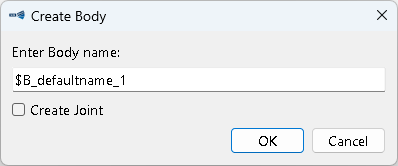
6. 不再默认创建Joints
在以前的版本中,每次创建部件时都会自动生成一个Joint。使用此新版本,在创建新部件时,默认情况下不再生成Joint。
使用Connections进行建模更简单、更用户友好,并具有内置摩擦和限制等优点。Connections是建立模型运动学的推荐方法。在Simpack默认的模型模板中,已经使用Connections代替了Joints。
7. 失效Joints时部件位置不变
对于基于Connections的模型,如果失效某个Connection,相应的部件将保持其位置和方向不变。现在,当失效某个Joint时,也会实现此功能。如果之后又启用了部件的Joint,则部件可能会移动并旋转到与Joint类型和Joint状态相匹配的状态。
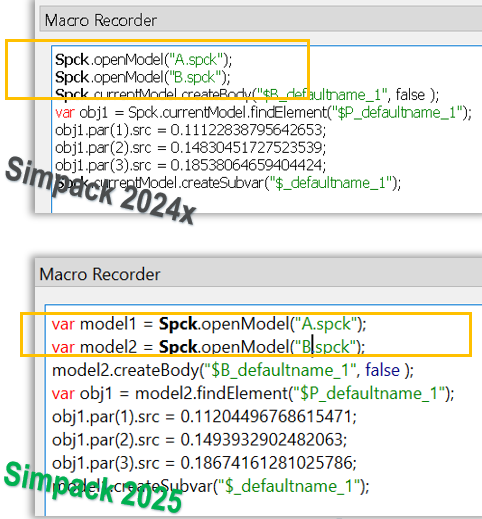
8. 宏录制功能支持多个模型
在以前的版本中,如果用户在录制过程中切换了当前模型,宏录制会产生错误的脚本。这可能会导致在错误的模型中创建元件。使用新版本,在录制宏时,现在使用每个模型的变量,而不是使用Spck.currentModel语句。
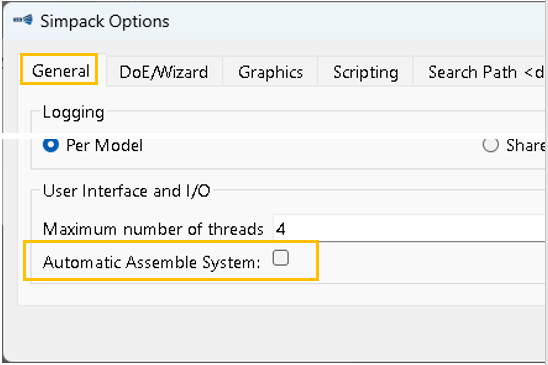
9. 新增自动装配系统功能
“自动装配系统”现在可以在Simpack Options窗口中激活。
如果启用该选项,每当修改使模型在运动学上不一致时,将自动执行装配系统操作。这样,与使用Joints建模相比,使用连接和初始条件建模可以为用户提供更好的用户体验。
装配系统期间是否应用初始条件由求解器设置的初始化设置控制。
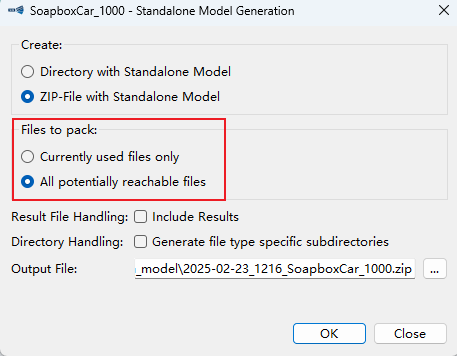
10. 打包独立模型可选择引用文件
传统上,独立模型生成器会将模型中所有可能引用到的文件都打包到独立模型中,会导致生成的独立模型比实际所需的更大。现在,用户可以决定是打包所有可能引用到的文件,还是仅打包当前正在使用的文件。
在 Simpack 前处理模块中,独立模型生成器对话框增加了相应的选项。
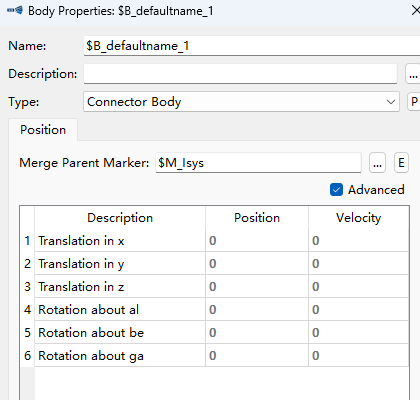
11. 新增加Connector Body类型部件
新增的部件类型“Connector Body”,实现了一种新的清晰简单的方法,以取代繁琐的哑物体使用。“Connector Body”类型的部件具有零质量和惯性,并通过“Merge Parent Marker”参数设置要合并到的部件上。合并父标记点必须是undeformed类型且不能是 Moved Markers。
如果未指定合并父标记,则会自动默认为Isys。强烈建议使用连接体,而不是质量较小的“哑”物体。
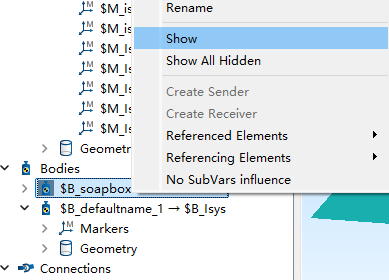
12. 新增几何体和部件的显示/隐藏命令
现在可以在3D页面页面中隐藏和显示元件。隐藏元件仍然可以通过模型树访问,并在模型树中以灰色状态标记。支持隐藏以下元件:几何体、部件、子结构、组。
右键快捷菜单中添加了“Show all hidden”便利功能。
隐藏部件和几何体不会导出到结果文件,因此在Simpack Post中不可见。
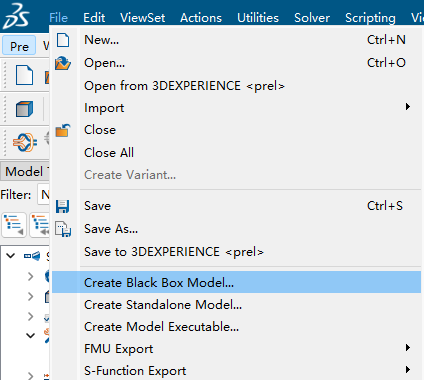
13. 新增导出黑箱模型功能
现在,通过新的黑箱模型(Black box model)功能,可以在不披露建模和产品IP的情况下分享Simpack模型。黑箱模型是一种被打包进专有二进制容器(即 “.bbspck” 文件)的独立模型。这些模型只能在 Simpack 中用作子结构。除以下情况外,黑箱子结构的所有元件都无法被访问:Senders、Receivers、U-inputs (editable)、Y-outputs、Result Elements。
黑箱模型通过通信器机制连接到相应的主模型中。
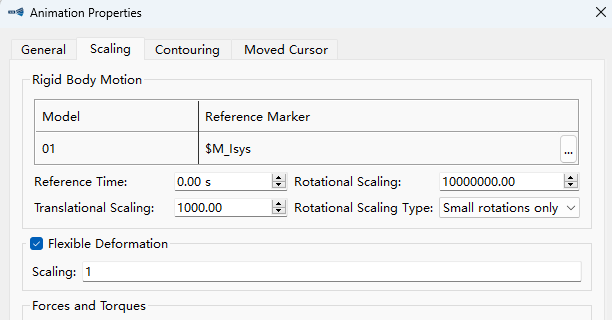
14. 后处理增加刚体运动缩放功能
为了更好地可视化和理解微小的运动和振荡,Simpack Post增加了新的“Rigid Body Motion Scaling”功能。缩放是相对于用户可选择的参考配置执行的,包括缩放参考标记(可以是移动标记)和参考时间。
15. FFT窗函数新增Blackman-Harris类型
快速傅里叶变换(FFT)窗函数库得到了扩展,新增支持 “Blackman-Harris” 窗,该窗函数通常也被称为 “ -92 dB Four-Term Blackman-Harris” 窗。这种新的窗函数类型可用于以下所有基于 FFT 的分析和元件:滤波器 68:“阶次分析”、滤波器 106:“频谱分析”、滤波器 1000:“坎贝尔图分析”、滤波器 1002:“频谱图分析”、结果单元 52:“辐射功率”、工作变形分析(ODS)。
柔性体模块
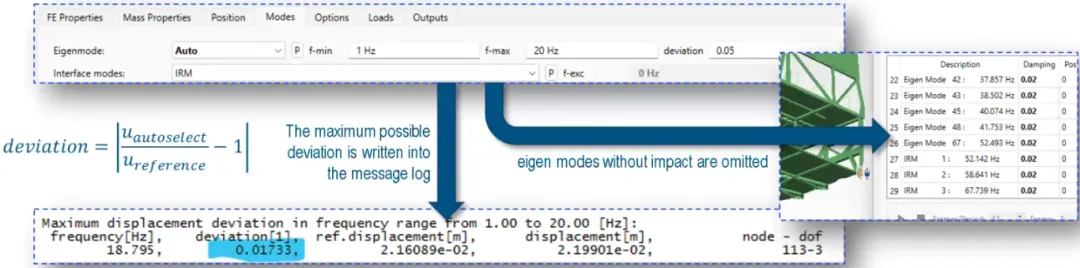
1. 柔性体模态自动选择功能增强
之前的自动模态选择方法(现已弃用)会根据容差数值来选择模态。用户需要在耗时的后续 Simpack 仿真中检查其精度。新的特征模态自动选择可确保在某个频带内达到用户指定的精度。该精度在所有接口自由度(即柔性体与多体系统耦合处的所有节点和方向)上进行测量。精度以相对于有限元子结构完整信息的相对偏差来衡量。
2. 与Abaqus联合仿真功能增强
支持从预载状态与Abaqus进行联合仿真。联合仿真求解不再受部件Joint/Constraint数量的限制,可基于任意数量的Connections元件建立模型。
对于那些通过联合仿真由 Abaqus/Standard 计算变形的部件,现在支持New求解器。这意味着在很多情况下,Simpack 端所花费的 CPU 时间将显著减少。
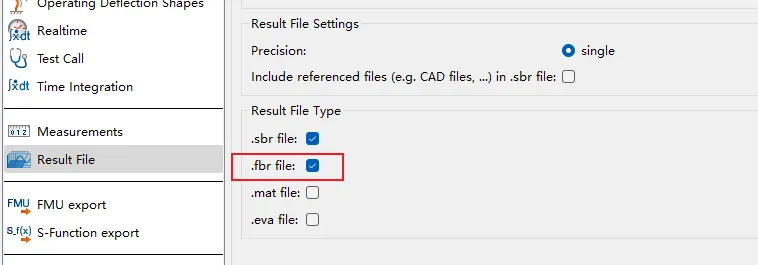
3. 输出fbr格式结果文件用于声学分析
现在支持一种新的fbr结果文件,可用于对采用 Wave6、Abaqus 和 Fe – safe 的线性柔性体进行后续分析。该结果文件包含了结果恢复所需的所有数据,如果之前进行过线性系统分析,还包含相应状态的时间历程,或者振幅和相位信息。这种新的结果文件以一致且通用的方式支持基于 SIMULIA 求解器的振动声学、疲劳等模拟。
求解器模块
1. 结果单元评估加速
具有多个输出通道的结果单元的评估速度显著加快。将对运行多个结果单元通道模型的性能产生积极影响。
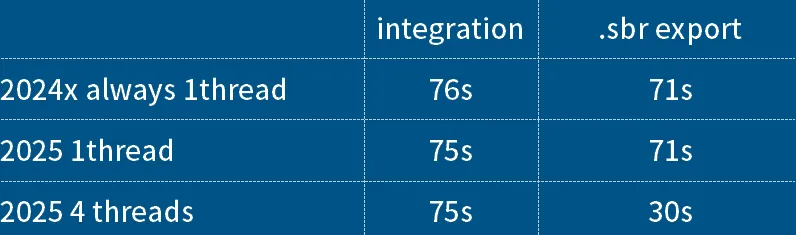
2. SBR结果文件压缩并行化
SBR结果文件的生成阶段现已重新设计,以便利用多核处理能力。在启用 4 核的情况下,观察到生成 sbr 文件所需的时间仅为之前的 35%。实际的加速效果取决于具体的模型和输出设置。
3. 结果单元 52 “辐射功率” 并行化
借助结果单元 52“Radiated Power”,Simpack 提供了一种无需进行详细声学分析就能计算辐射声功率的简化方法。在 Simpack 的早期版本中,该单元的计算时间较长。现在,计算时间得到了显著改善,并且还能受益于并行求解器。
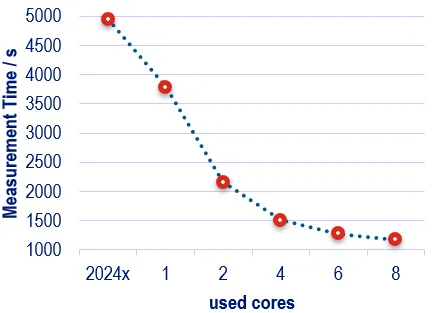
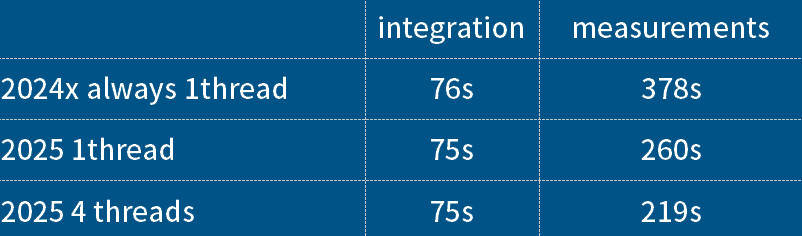
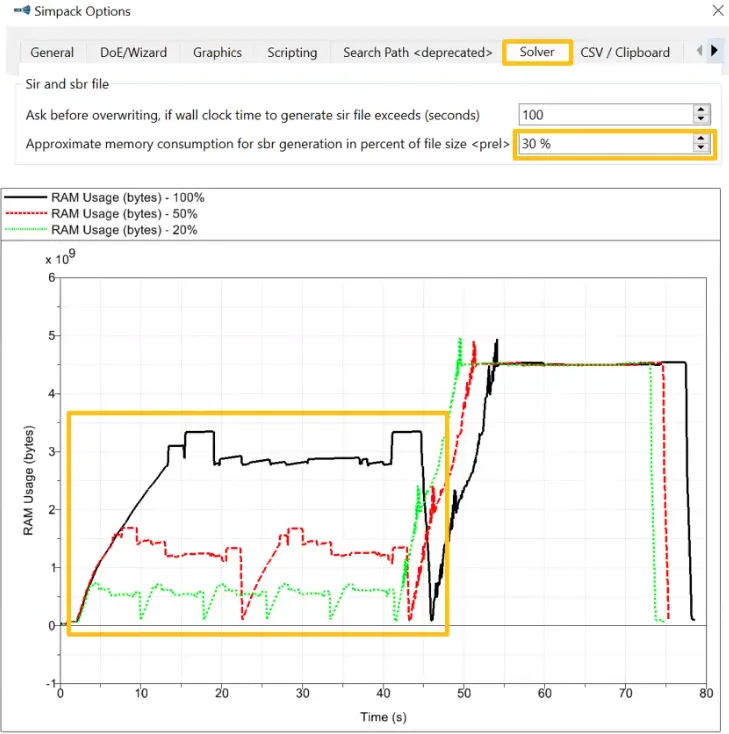
4. 在测量过程中减少内存占用设置
在Measurements测量过程中,数据会一直保留在内存中,直到整个仿真过程结束(在最后一步写入 sbr 文件)。因此,对于某些仿真而言,内存消耗可能会变得相当大。为改善这一状况,在 Simpack 2025 中增加了一项新功能,可按 “批次”(或 “数据块”)来拆分 SBR 的处理过程。可在 “Options”>“Solver”>“Sir and sbr file”命令中启用。在Simpack 2025x版本中,减少内存消耗的特性进一步扩展,使其也能覆盖网格和场结果通道,以及未经过滤的结果单元通道。
5. 全面支持 AMD Epyc/Ryzen 系列 CPU
Simpack 求解器现在全面支持诸如 Epyc 和 Ryzen 等最新的 AMD CPU。相应的数值计算库已进行了优化,以在这些类型的 CPU 上实现最佳性能,同时确保除某些第三方提供的建模元素外,在不同的 Intel 和 AMD CPU 上都能得到可复现的结果。
为实现这一点,基础数学计算的底层库进行了更新。求解器设置中的 “数值可复现性” 选项也进行了相应的扩展。
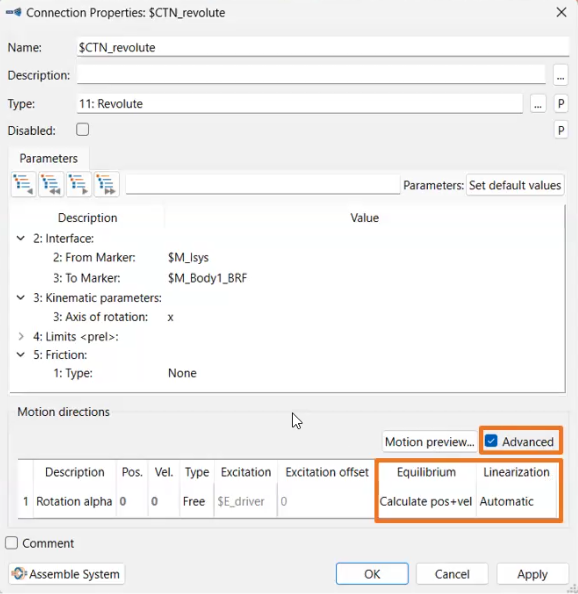
6. 连接元件的平衡和线性化处理功能增强
Connections元件的平衡和线性化处理功能得到了增强,在其属性对话框中新增了类似Joints对应设置的选项:对于平衡分析,可以禁用位置和速度的计算。对于线性化分析,可以设置要导出或明确解析的状态。
铁路模块
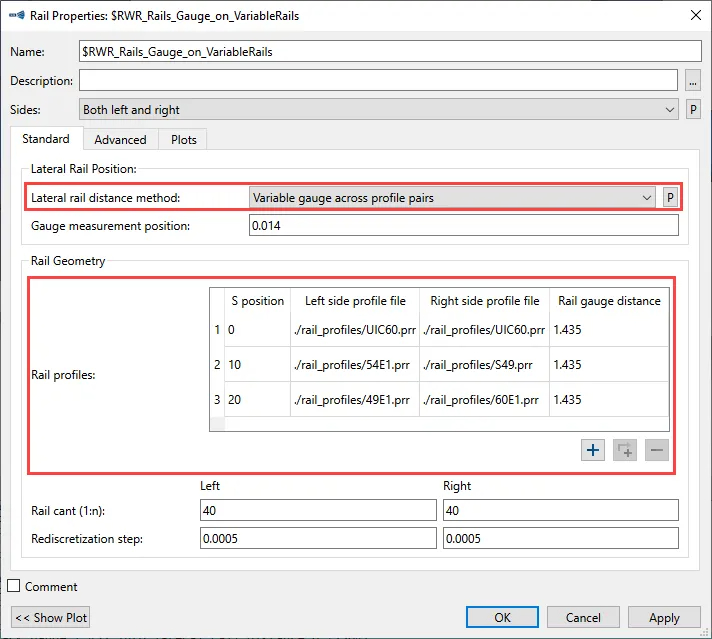
1. S变量轨道的轨距应用
轨道横向距离既可以明确设置为轨道中心线与铁轨之间的距离,也可以通过设置轨距值来表示铁轨内侧面之间的横向间距。
引入了一个新选项 “Variable gauge across profile pairs”,用于将轨距应用于每一对 S变量轨道踏面。使用此选项时,左右踏面必须在相同的 S位置输入。
车辆模块
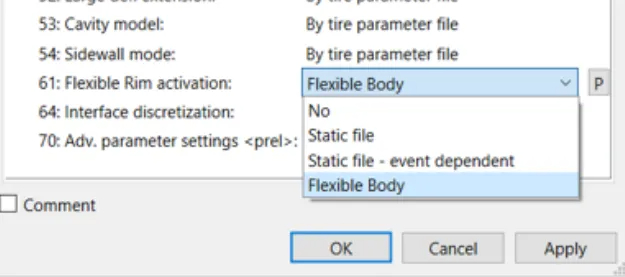
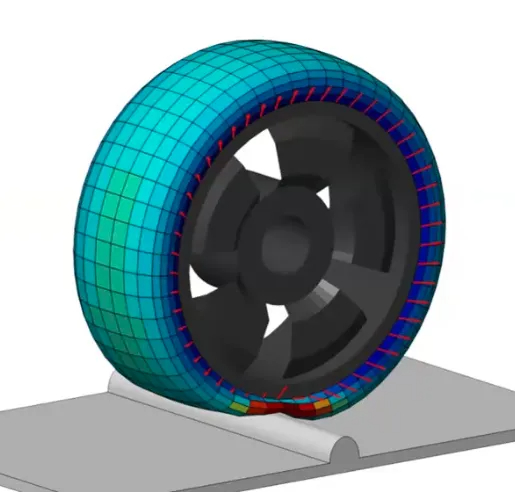
1. CDTire轮胎更新
在之前的 Simpack 版本中,力元 72 “CDTire” 就已经支持借助一个包含相应柔性信息的附加文件,对柔性轮辋进行建模。在此版本中,可以将柔性体用作柔性轮辋了。可以通过将参数61 “Flexible rim activation”设置为 flexible body ,启用此功能。
此前的 “静态” 柔度建模方法,对于诸如滥用工况模拟等场景是足够的,因为在这些场景中,柔性轮辋的动态特性可以忽略不计,但对于 NVH仿真则不够用。这一改进功能将有助于提供更精确的 NVH 仿真结果。
对于力元 72 “CDTire”,在 Simpack 前处理模块的 3D 图形中增加了 “Shell mid-plane” 和“Tire outer shape”的可视化显示功能。
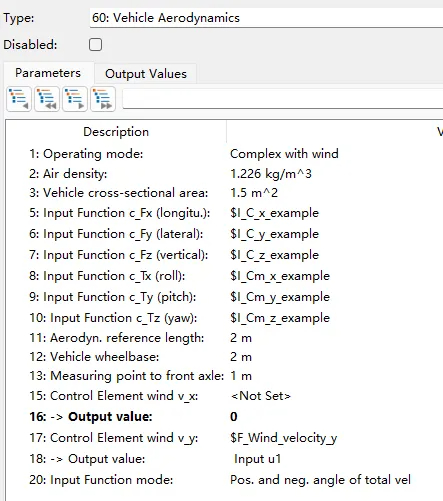
2. 车辆空气动力学力元
力元 60 “Vehicle Aerodynamics’” 不仅能够捕捉阻力,还能捕捉升力降力。未来版本还会在该元件中纳入更多空气动力学效应。
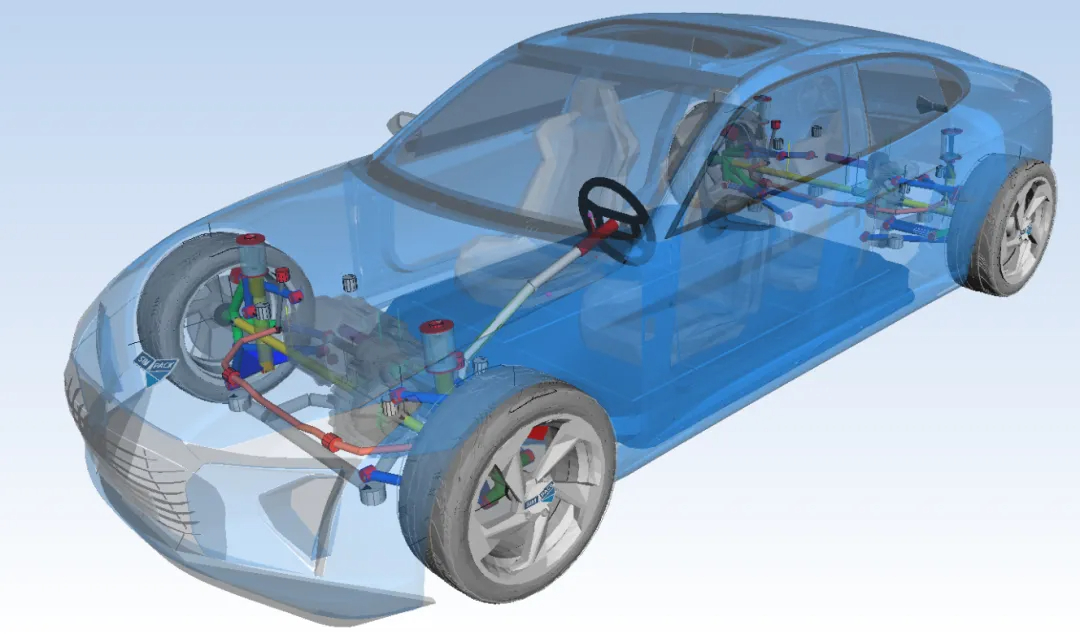
3. 发布新的汽车模型库
新模型库增加电驱动、电池包等新能源车辆的拓扑结构,丰富了仿真工况,包括模型调参场景及常用的仿真场景,增加了工况预定义的输出指标。
传动系模块
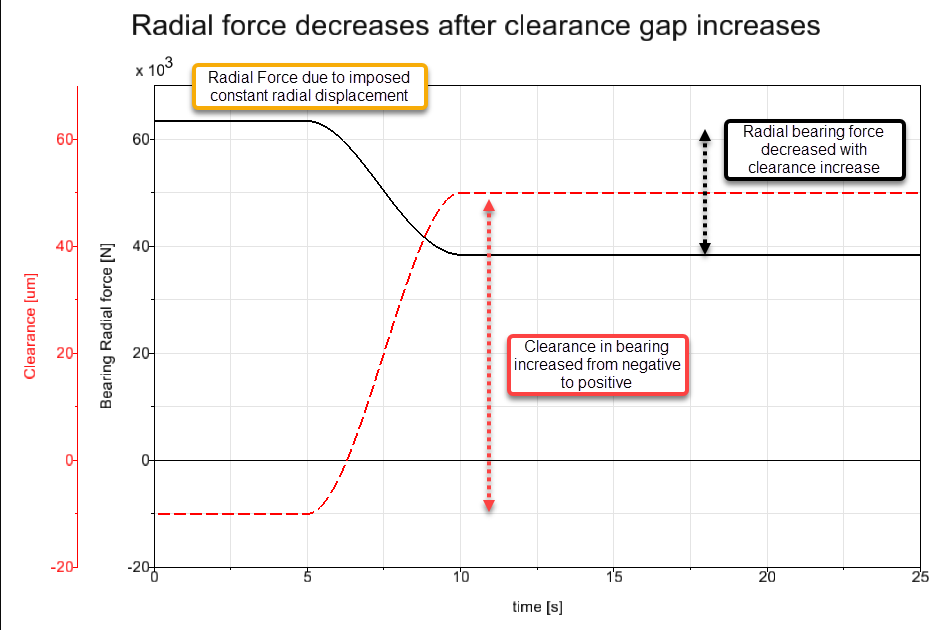
1. 滚动轴承支持负间隙
用户可以在FE88滚动轴承元件中设置负间隙,增加轴承预载荷特性。支持根据时间定义轴承间隙,从而模拟热效应造成间隙变化对轴承特性的影响,包括径向间隙及轴向间隙设置。
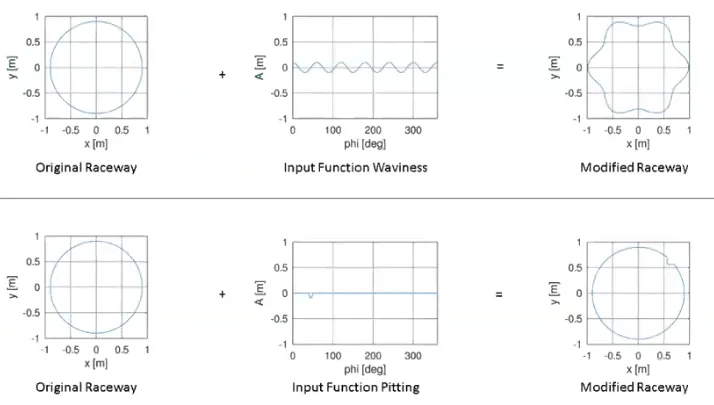
2. 滚动轴承力元中考虑滚道偏差
现在可以通过径向偏差对滚动轴承滚道的缺陷(如波纹度和点蚀)进行建模。这些偏差通过一个取值范围在 [0, 2π] 的输入函数来定义。
3. 无质量绳索力元可视化
可以在Simpack Pre中直接可视化力元 246“Massless Cable”的路径,而无需定义几何。可以通过该力元对话框中的新的“Visualization”选项卡访问和定义此可视化。在后续版本中,当将模型拖动到动画中时,绳索的可视化也将在Simpack Post中立即可见。

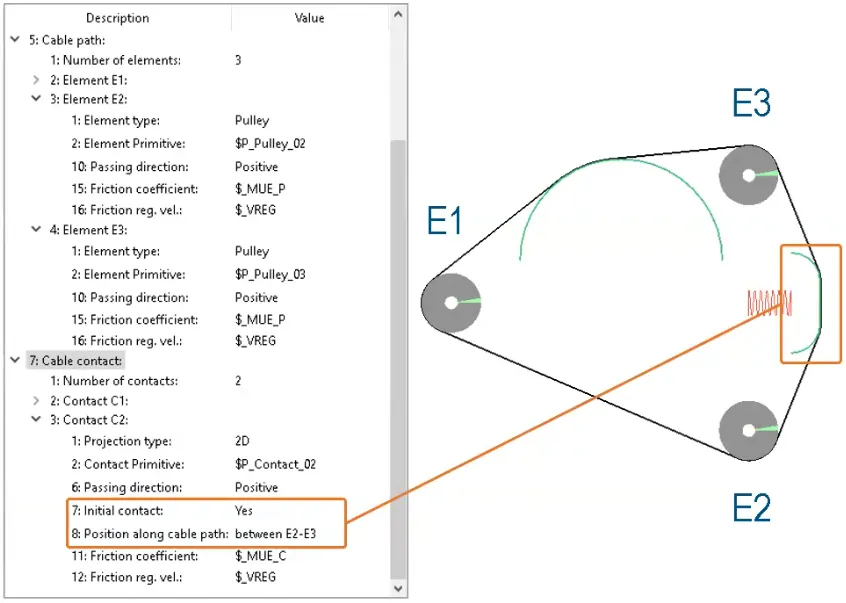
4. FE 246 “无质量绳索”力元新增定义初始接触的选项
对于 “Cable contact” 参数中定义的每个接触,现在可以定义是否要在初始绳索布局中考虑该接触。如果某个接触被定义为初始接触,那么还可以在 “Cable path” 参数中指定各元件之间应在哪个位置开始考虑该初始接触。
在设置涉及多个接触的更复杂绳索布局时,此选项提供了更大的灵活性。
请注意,对于现有的模型,一些之前被自动检测到的接触现在可能需要手动设置为初始接触。
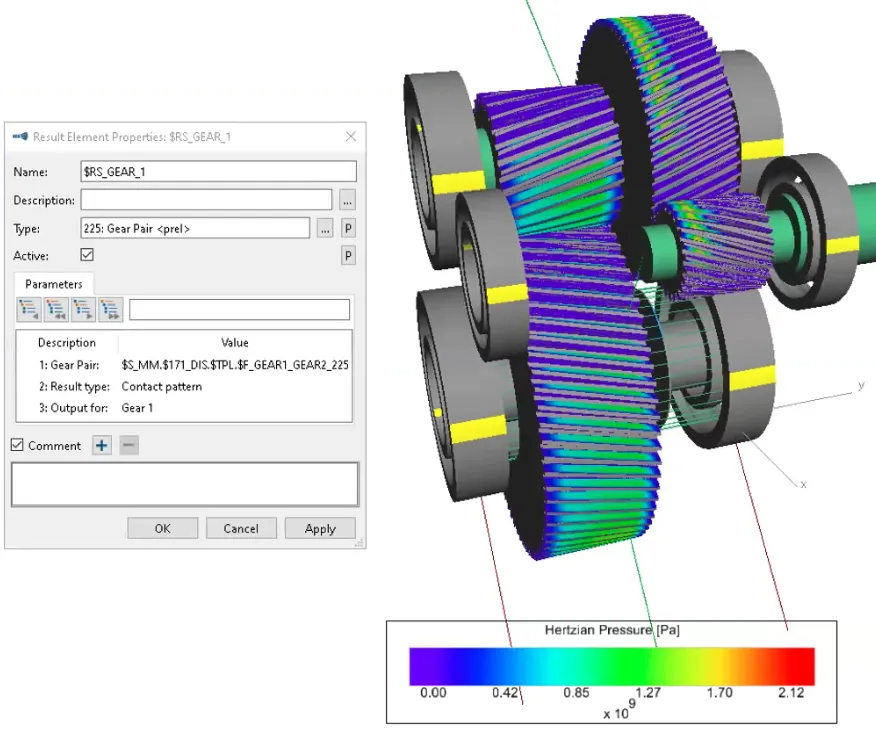
5. 新增结果元件用于输出齿轮副齿面接触斑
为了满足更高级的齿轮后处理任务,如齿轮 “接触斑” 分析,新增了结果元件 “Gear Pair ”。
这一新增输出功能可在 Simpack 后处理的 3D 动画中直观呈现每个齿面在上一啮合周期内的接触压力变化历程。其典型应用场景包括:
识别齿面高应力区域:明确齿面上承受最大应力的部位。
验证设计方案有效性:检验诸如齿形修形等设计选择是否达到预期效果。
对比试验台结果:将仿真得到的接触斑与试验台实测结果进行对比分析。
由于该结果元件基于现有力元 225 “齿轮副” 的实际动态输出,因此可在包含非线性轴承和柔性部件等因素的完整齿轮箱系统中进行动态评估。
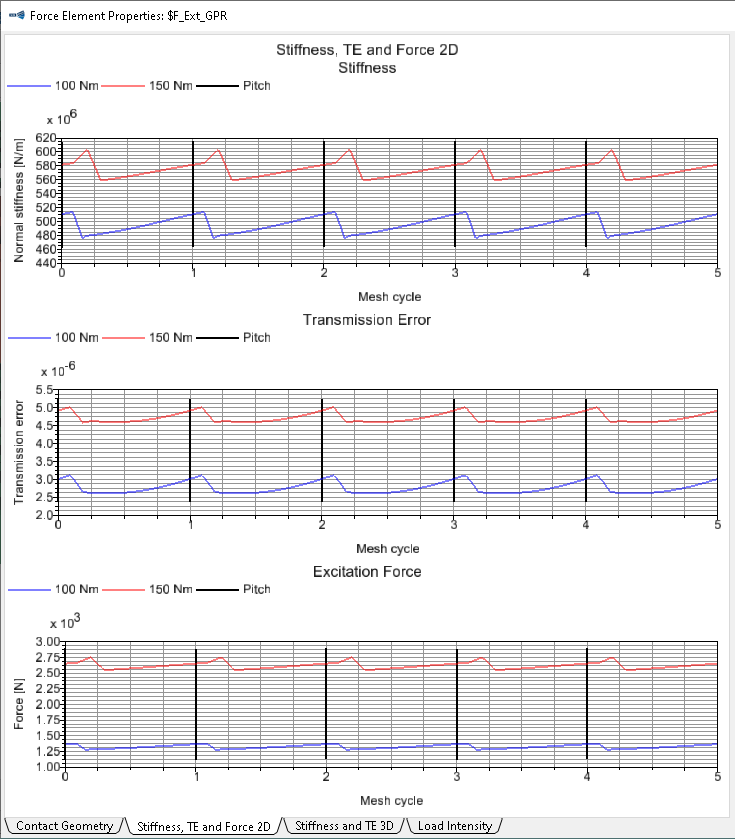
6. 齿轮力元新增了 “激振力” 绘图功能
力元 225 “齿轮副” 的绘图中新增了一个 “激振力” 特性曲线。与 “刚度” 和 “传递误差” 曲线等静态齿轮啮合特性不同,该曲线可用于估算运行过程中齿轮接触处的力波动情况。
假设在高速运转的齿轮传动中,由于转动惯量的存在,传递误差会保持在一个恒定的平均值,而齿轮啮合刚度会发生波动。它有助于在 NVH分析中快速估算齿轮啮合力。
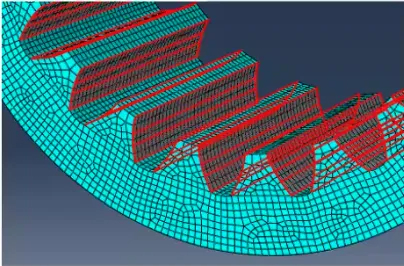
7. FE 242 “花键”力元新增以表面节点集作为节点搜索模式
242 “花键”力元增加了定义柔性花键的新选项。为了确定施加力的节点,可以使用花键所有齿面的一组恢复后的表面节点。这组表面节点用于在每个齿节圆半径处的对称轴上自动创建内部节点,以便施加齿力。用户可以通过新参数 33 “Flexible forces per tooth” 来设置每个齿的内部节点数量。
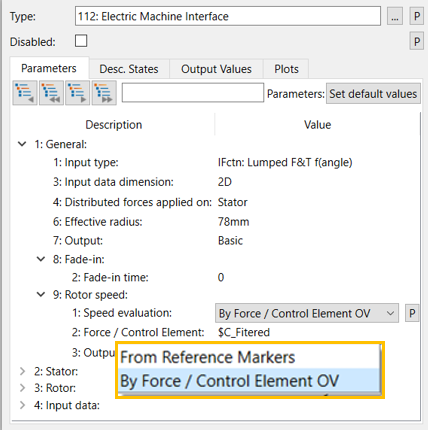
8. 电机接口力元增加新的转子速度选项
在之前的版本中,转子转速评估仅能基于参考标记点的测量结果进行,因此转子的振荡(如果存在)会被包含在内,并在输入电磁数据时予以考虑。
现在,除了通过转子和定子标记点测量转速外,还可以选择任意 Simpack 力元或控制单元的输出值。这使得用户在将转速作为电磁数据的输入之前,既可以对转子转速进行滤波处理,也可以使用理想的转速曲线。
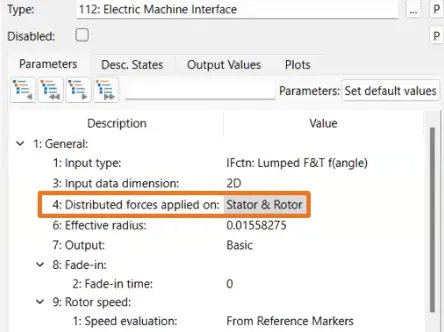
9. “电机接口” 力元新增双侧分布力选项
之前,FE 112 “电机接口” 力元一直是将分布力施加到一个部件上,而将集中力施加到相对的部件上。现在引入了一个新选项,可在双侧(即转子和定子)都施加分布力。
支持集中力和力密度两种情况。对于集中力,相对表面上的力和扭矩同样以集中力的形式施加,此时必须指定相对表面上的力作用点数量。对于力密度,力会直接施加到相对表面的节点上。
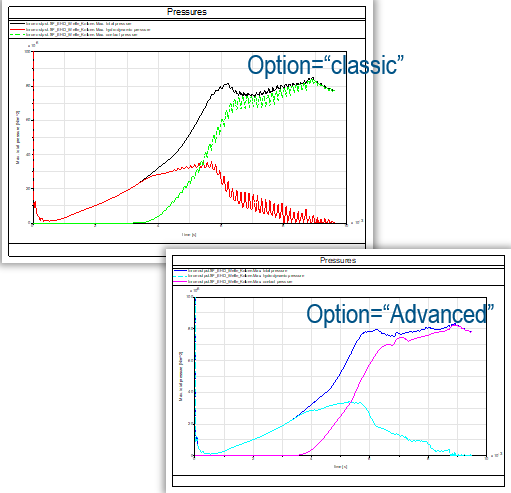
10. EHD增加高级选项
在EHD的通用参数中引入了一个新参数 “Elastic deformation projection”。当选择 “Advanced” 选项时,能实现将柔性变形更平滑地映射到流体网格上,这与使用更精细的网格具有类似的效果。这有可能改善包含柔性体 EHD 模型的计算结果。而选择 “Classic” 选项时,表现的是 Simpack 2024x 及更早版本的性能。
此外,柔性体变形选项是’Surface Nodes (EHD)’ 和’Multiple Shell/Journal Marker’时,支持参考标记点为变形类型的标记点(此前限制必须是未变形标记点)。
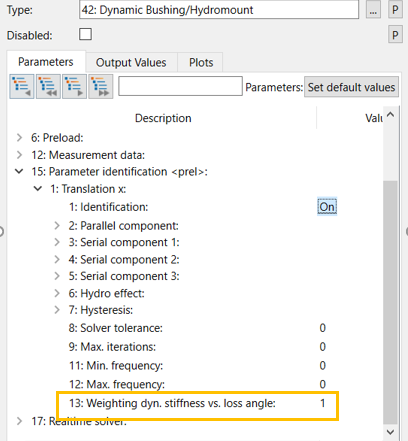
11. 动态衬套增加自动参数辨识功能
增加了FE42动态衬套基于测量数据的自动参数辨识功能,并能完全集成到该力元的参数选项界面和绘图中。可以设置相关参数的下限和上限、频率范围和求解器及迭代次数等数据。
可以对动态刚度和损耗角之间的权重进行调整。使用新参数“Weighting dyn. stiffness vs. loss angle“选项进行设置。
12. 动态衬套实时仿真能力提升
力元 42“Dynamic Bushing/Hydromount”2.0 版本为串联和滞后元件的动态状态新增了一个选项 “Realtime solver”-> “Optimized state handling”。
当模型中使用了大量串联或滞后状态,并启用此功能时,对于采用固定步长积分器的实时应用仿真,该选项可显著提高仿真速度。
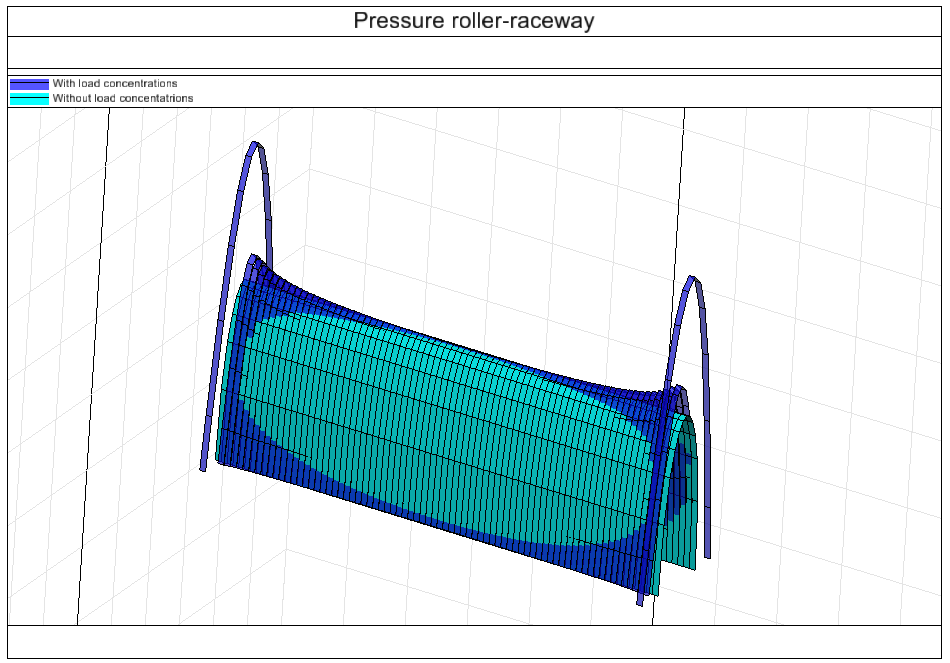
13. 凸轮接触重命名为滚动接触
力元198 “Cam Contact”被重新命名为 “Rolling Contact”,以更好地反映其用途。在功能上,在接触压力分布中新增了边缘效应选项,可以通过新参数“Consider Load Concentration”激活。